# 1 Introduction
# 什么是并行计算
- 并行计算 (parallel computing):在同一个计算机体系的多个处理器/电脑一起工作解决一个问题
- 分布式计算 (distributed computing):分布在多个计算机体系(异地)的处理器/电脑一起工作解决一个问题
- 并行计算机 (parallel computer):一个多核的计算机系统
- 并行计算机分为多计算机系统和中心化多处理器
- 多计算机系统 (multicomputer):多个计算机通过内部网络连接
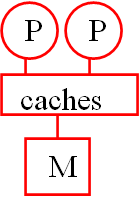
- 中心化多处理器 (centralized/symmetrical multiprocessor, SMP):一个计算机系统,其中所有 CPU 共享一个全局内存
并行计算多用于科学计算,分布式计算多用于可靠性、可用性、性价比高的计算。
# 为什么需要并行计算
- 微处理器性能增长越来越慢
- 同样的性能下,并行系统功耗更低
# 并行计算关心的问题
不懂的地方都给出英文原文……
- 架构上的问题:
- Pipline, ILP...
- 缓存一致性
- 单共享总线 or 网络
- UMA, NUMA, CC-NUMA, Cluster...
- 编程模型上的问题:
- 单寻址空间 or 多寻址空间
- 进程使用锁、消息传递 or 其他方法进行同步
- 分布式 or 中心化内存
- 故障可靠性
- 性能表现上的问题:
- 指标:规模、加速比、可扩展性
- Models: PRAM,BSP,PPRAM...
- 并行计算的评价方法
- 其他问题:
- 编程语言
- 编程工具
- 可移植性
- Automatic programming of parallel computers
- Education of parallel computing philosophy
# 如何编写并行程序
- 需要明确告诉不同处理器如何分工
- 需要把串行程序改写为并行
- 有时候直接改写的效率非常低,需要设计全新的算法
# 举个栗子
例子:求 n 个函数值的和,其串行算法如下:
sum = 0;
for (i = 0; i < n; i++)
{
x = compute_next_value(...);
sum += x;
}
假设我们有 p 个核 (p < n),每个核计算一部分:
my_sum = 0;
my_first_i = ...;
my_last_i = ...;
for (my_i = my_first_i; my_i < my_last_i; my_i++)
{
my_x = compute_next_value(...);
my_sum += my_x;
}
计算后的结果存在私有变量 my_sum 中。
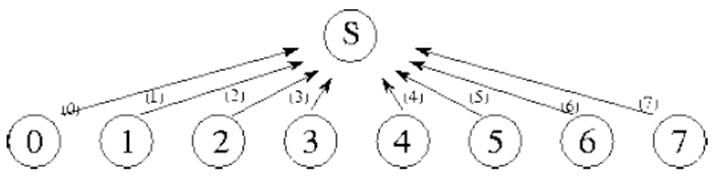
所有核计算完成后,他们将结果发送至班长(一般就设 0 号核为班长),班长负责计算最终的总和。
if (I am the master core) {
sum = my_x;
for each core other than myself {
receive value from core;
sum += value;
}
} else {
send my_x to the master;
}
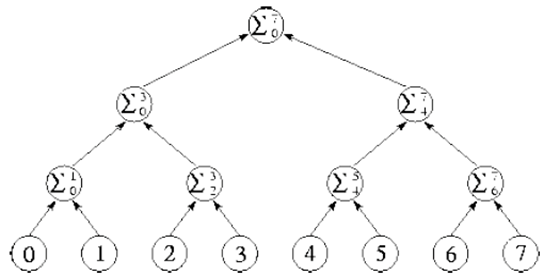
更好的并行策略是,不要让班长核做所有的合并工作,而是均摊高每个核上。
对于这个问题,可以两两组合:
Work with odd and even numbered pairs of cores. Pair the cores so that core 0 adds its result with core 1's result,Core 2 adds its result with core 3's result, etc. Repeat the process now with only the evenly ranked cores. Core 0 adds result from core 2. Core 4 adds the result from core 6, etc. Now cores divisible by 4 repeat the process, and so forth, until core 0 has the final result.
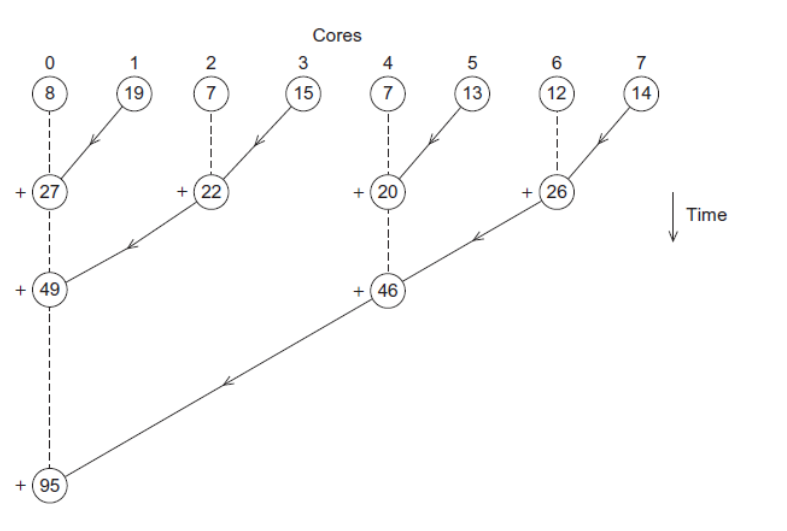
这种算法中,班长只进行了 3 次通信 + 3 次求和,相较刚开始的 7 次通信 + 3 次求和。如果核数更多,这样优化的效果会更加显著。
但是,越复杂的问题,并行的难度会更大(比如翻译程序)。所以我们需要编写并行程序来提高多核的利用率。
# 并行程序的编写方向
- 任务并行:将整个任务分成很多不同的小任务
- 数据并行:将数据进行分块,每个核在自己分到的数据上做相似的任务
例子:3 个老师(A、B、C)批改 300 张试卷,每张试卷 15 题。
- 任务并行(将试卷按题目进行划分):A 老师批改 1-5 题,B 老师批改 6-10 题,C 老师批改 11-15 题
- 数据并行(将试卷按张数进行划分):每位老师各批改 100 张试卷
# 习题
在求和的栗子中,设计一个分配任务的函数(该函数负责计算每个核的 my_first_i 和 my_last_i),使得 个任务尽量均匀地分布在 个核上。
(这个题目后面应该会讲)
一个优秀的算法是:
其中 为当前核的下标,从 0 开始。
my_last_i 比较好理解,因为任务分配是连续的,my_last_i 就是 下一个核的 my_first_i 减 1。
至于 my_first_i 的由来我也没想清楚,但是它可以保证所有任务的数量差不超过 1,很均匀。
各位不妨写一个程序模拟一下分配情况,看看每个在不同的 n、p 下,每个核被分了多少个任务、规律是怎么样的。如,在 n=30,p=9 时,该算法会这样分配:
3 3 4 3 3 4 3 3 4
# 2 Parallel Programming Platform
# 对冯诺依曼体系的改进
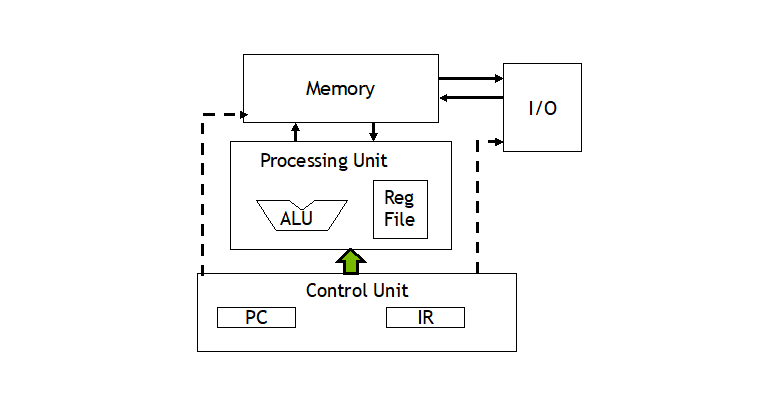
冯诺依曼的核心是:存储程序,顺序执行。
该体系的瓶颈一般是 CPU 和内存分离。
改进分为三个方向:
- 缓存
- 虚拟存储
- 底层的并行(指令集并行、线程级并行)
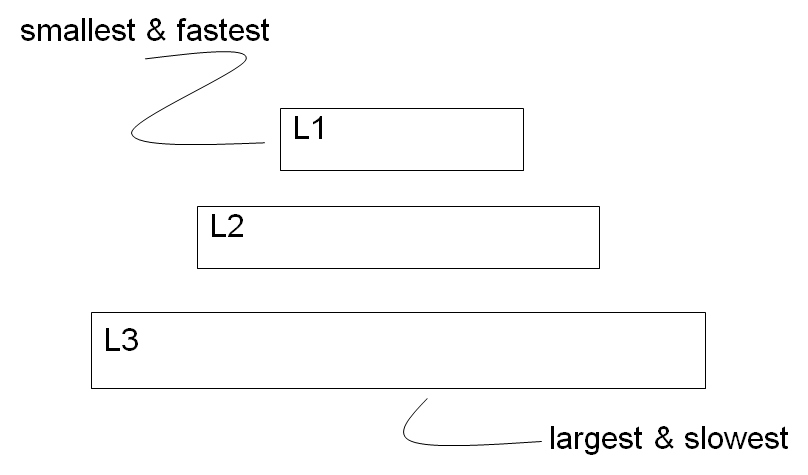
# 缓存
缓存:比主存更快的存储。一版用户存放物理上接近、且经常使用的数据和指令。
局部性原理略。
缓存分为 3 级。
Cache 命中(Cache hit)和不命中(Cache miss)
# 缓存的写策略
当 CPU 更新缓存的数据时,缓存数据可能会和主存不同。此时有两种策略:
- Write-through(写直达):更新缓存的同时更新主存;缓存和主存始终一致,但每次写缓存的速度会变慢。
- Write-back(写回):更新缓存时标记缓存为脏数据(dirty),当该行缓存被替换时,脏数据会被写回至主存;写缓存的速度不受影响,但缓存替换时的速度会变慢。
# 缓存的映射方法
- 全映射:每行内存可以映射在缓存的任意位置
- 直接映射:每行内存只能映射在缓存的固定位置(一般是内存行数下标 % 缓存总行数)
- n 路组相联映射:将缓存每 n 行分为一组,每行内存可以映射在缓存的固定的组的 n 行中任意一行(一般组号 = 内存行数下标 % 缓存总行数 % n)
使用全映射或 n 路组相联映射,还需要考虑替换策略,常见的可以使用 LRU。
# 缓存优化的技巧
缓存对于应用程序和程序员是透明的(不能直接控制缓存),但如果知道局部性原理,可以通过改变程序顺序、间接控制缓存,进而优化速度。
- 合并数组(data merge):通过将两个独立数组合并为一个复合元素的数组来改进空间局部性
- 循环交换(loop interchange):通过改变循环嵌套来按序访问存储器中存储的数据
- 循环合并(loop fusion):将两个具有相同循环类型且有一些变量重叠的独立循环合并
- 块化(blocking):通过不断使用一些数据块(而不是完整地遍历一行和一列)来改进时间局部性
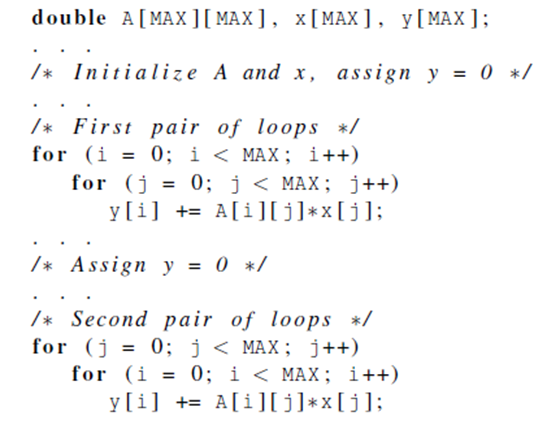
假设缓存大小为 4。第一种循环会发生 4 次缓存未命中、第二种循环会发生 16 次缓存未命中。(注:缓存的机制是,每次缓存不命中会将所在行的 4 个元素全部装进缓存)
# 虚拟内存
虚拟内存的大小大于主存,会将不活跃的程序换到磁盘,活跃的程序放到主存,加快速度。
# 指令级并行
- 流水线技术,参考计算机系统结构
- 某些情况下,多条指令也可以被同时发射
- 分支预测
# 线程级并行
略。
# 并行计算的硬件
- SISD(传统冯诺依曼模型)
- SIMD:对多个数据进行相同操作,1 个控制单元 + 多个 ALU
- MISD(尚未开发)
- MIMD:使用多个指令流同时操作多个数据流,多个独立操作单元 + 各自的 ALU
# MIMD 物理组织
从上到下越来越离散:
- 共享缓存架构(Shared Cache Architecture),多为单芯片多处理器
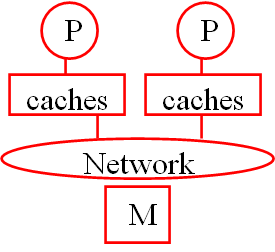
- 统一内存寻址(Uniform Memory Access,UMA)
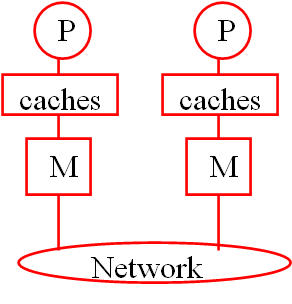
- 独立内存寻址(Non-Uniform Memory Access,NUMA)
NUMA 并不是处理器完全不能访问其他块的内存,而是处理器可以直接访问一部分内存+通过处理器内置的特殊硬件访问其他内存。
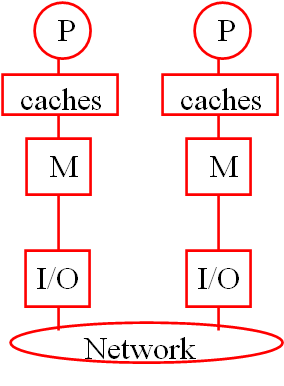
- 分布式系统/内存、集群(Distributed System/Memory)
# 共享内存系统
略。
# 互连网络
网络的类型、网络的性能指标的一堆概念略。
# 多维 Mesh 网络
Mesh:将一维线性的网络拓展到二维、三维或更高维度,结点之间只能和邻居进行交流。
# 超立方体结构
超立方体结构: 维的超立方体有 个结点。
对超立方体进行编号,可以按照如图的规律:
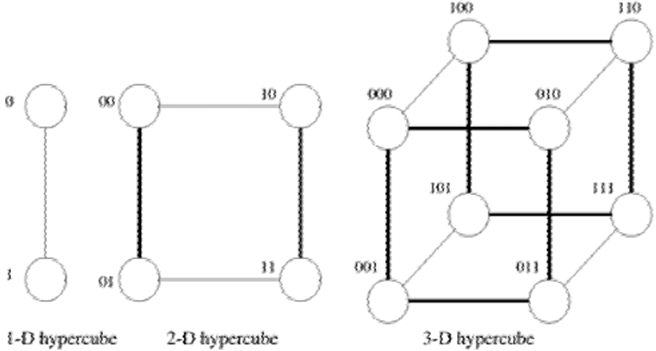
每个 维的超立方体可以分成两个相同的 维超立方体,编号分别以 0 和 1 开头,且两个子超立方体对应结点的编号除第一位外相同。
按此法可以构造出四维超立方体。
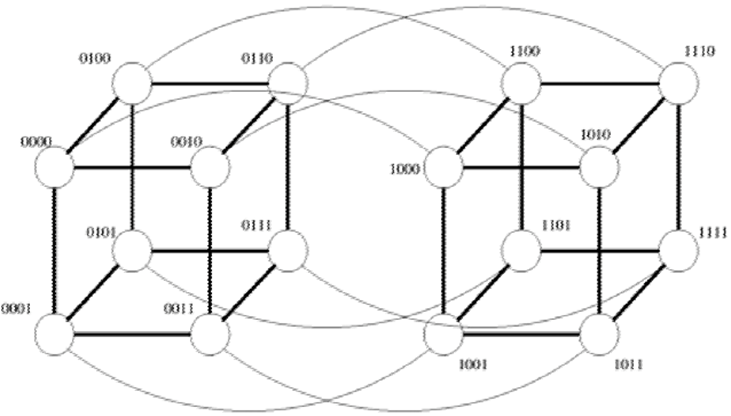
该编号方案还有一个性质:两个结点的距离等于这两个结点的汉明距离(不同的位的数量)。如在图中,0110 和 0101 的距离为 2。该性质在使用超立方体构造并行算法时会很有用。
# 缓存一致性
缓存的写策略有 Write-back 和 Write-through。在 UMA 架构下,多个处理器有各自的缓存,共用内存。
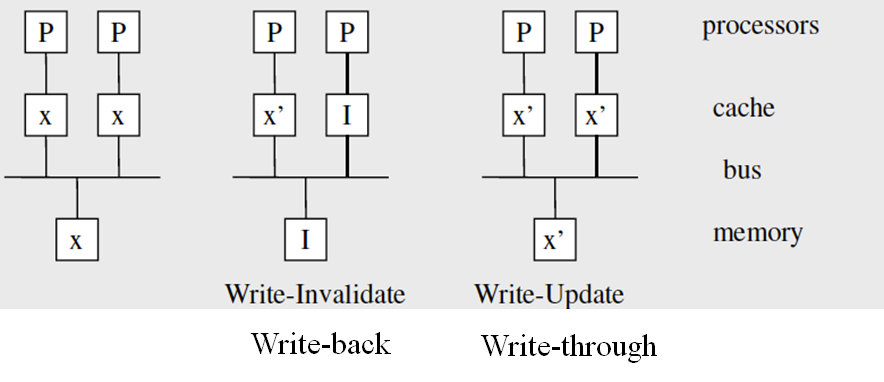
于是,出现了两个新的概念:
- Write Invalidate:处理器写自己的缓存时,使其他缓存失效;Write-through 下还需要更新内存,Write-back 下需要使内存失效。
- Write Update:处理器写自己的缓存时,立即更新其他缓存;Write-through 下还需要更新内存,Write-back 下需要标记缓存为脏,在缓存失效的时候写回内存。
两种策略在什么情况下性能更好?(猜测是在不同核频繁更新不同数据时,写失效更好;多个核都在频繁写同一个数据时,写更新更好。)
现代计算机都默认使用写失效策略。(猜测是因为局部性原理,多核读不同数据的情况更多)
# 写失效协议
三种状态:Shared、Invalid、Modified(MSI)
Shared:存在多份有效的数据(写会导致其他失效)Modified:只有当前数据有效(写不会导致其他失效)Invalidate:数据无效(读会请求数据)
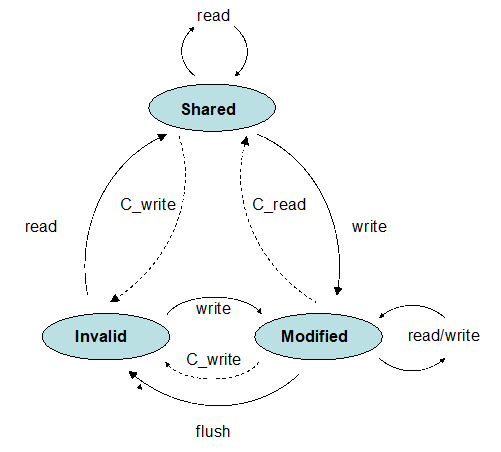
硬件条件:所有核共享一个总线,可以用于广播。当 0 号处理器更新了 x,会广波这个消息,其他核听到(snoop)以后就会把自己的 x 标记为 Invalid。
- 当一个数据是
Modified后,所有操作都直接在本地进行,无需向外部广播。 - 多个核读入一个数据时,所有缓存的内容都会变为
Shared,随后所有的读操作都直接在本地进行,无需向外部广播。 - 多个核同时读和写时,会出现(在带宽上的)瓶颈
# 基于目录的缓存一致性协议
- 基于目录:共享的状态都存储在(位于内存的)“目录”
- 目录里用一位表示 shared/dirty 状态(State)
- 目录里用一个 bitmap 表示数据被缓存在哪些处理器(Presence Bits)
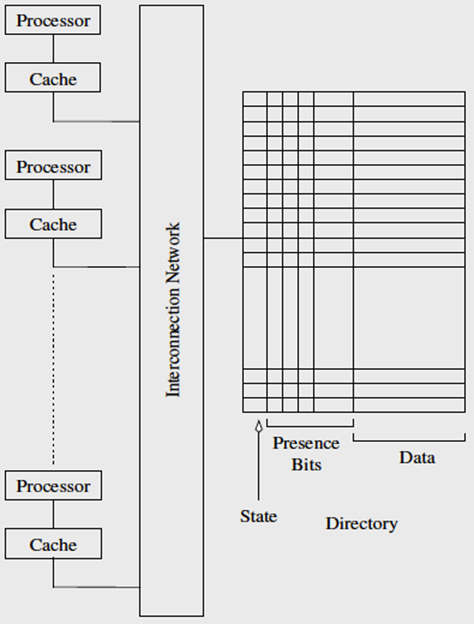
- 处理器 0 和处理器 1 读 x,此时状态为 shared,0 和 1 的 presence bits 均为 1
- 处理器 0 写变量,状态变为 dirty,1 的 presence bits 为 0
- 处理器 2 读变量,将会请求处理器 0 写回,随后 0 和 2 的 presence bits 均为 1
该方案的开销主要是通信开销、以及可能出现频繁的争端。
如果一个并行程序需要大量的一致性操作(大量的读/写共享数据块),目录最终会限制它的并行性能。
还可以分布式的目录系统,但是这里就学了。
# False Sharing
不懂
# 并行计算的软件
并行软件也有区别:
- 内存共享系统上,一个进程 fork 出多个线程
- 分布式系统上,需要多个进程
SPMD: single program multiple data,MPI 和 CUDA 都是用的都是这种。
解决并行软件的不一致性:给数据加锁
SPMD 的写法:
char message [ 1 0 0 ] ;
. . .
my_rank = Get_rank ( ) ;
if ( my_rank == 1) {
sprintf ( message , "Greetings from process 1" ) ;
Send ( message , MSG_CHAR , 100 , 0 ) ;
} else if ( my_rank == 0) {
Receive ( message , MSG_CHAR , 100 , 1 ) ;
printf ( "Process 0 > Received: %s\n" , message ) ;
}
# 输入输出
Google 翻译 yyds
当我们的并行程序需要进行 I/O 时,做出这些假设并遵循这些规则: 在分布式内存程序中,仅进程0将访问stdin。 在共享内存程序中,只有主线程或线程 0 会访问 stdin。 在分布式内存和共享内存程序中,所有进程/线程都可以访问 stdout 和 stderr。 然而,由于输出到 stdout 的顺序不确定,在大多数情况下,除了调试输出之外,只有一个进程/线程将用于所有输出到 stdout。 调试输出应始终包括生成输出的进程/线程的等级或 ID。 只有单个进程/线程会尝试访问除 stdin、stdout 或 stderr 之外的任何单个文件。 因此,例如,每个进程/线程都可以打开自己的私有文件进行读取或写入,但没有两个进程/线程会打开同一个文件。
# 3 Parallel Program Design
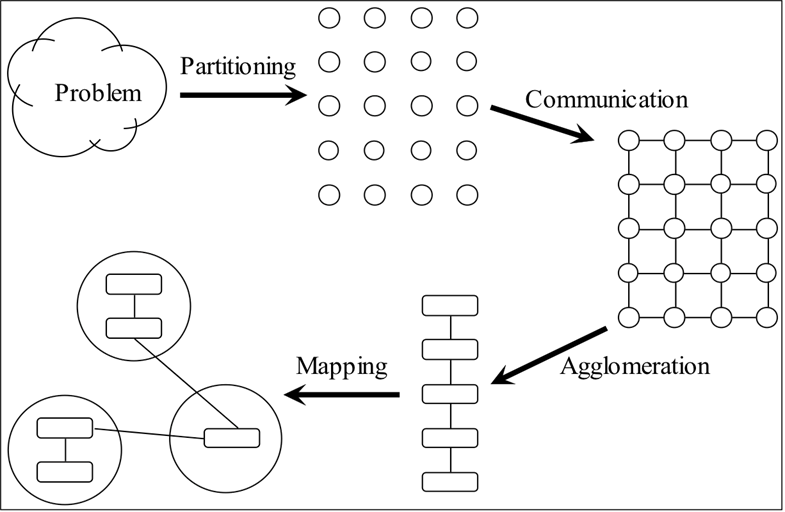
# Foster 四步走
注意这四步,是设计算法的过程的四步,而不是并行算法的先后步骤。
- Partitioning:分块
- Communication:通信
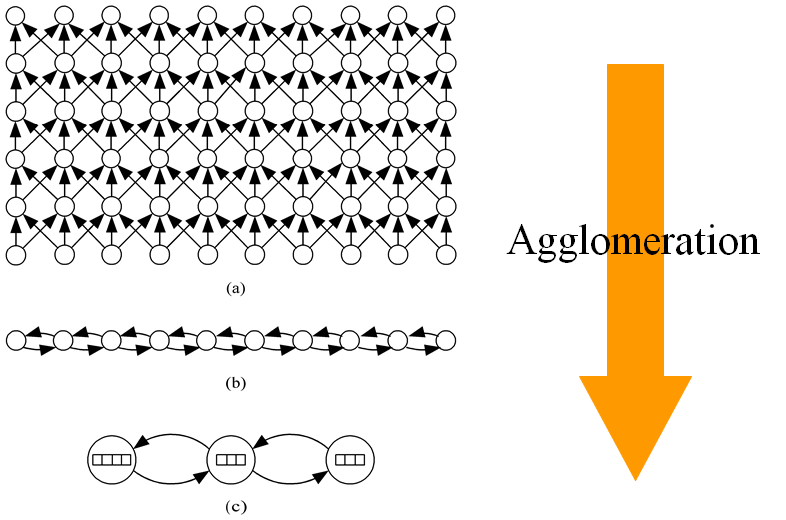
- Agglomeration:组合
- Mapping:映射
# 分块
Domain vs. Functional Decomposition
其实就是数据并行 vs. 任务并行
# 通信
通信方法可以分为局部通信和邻居通信

例子:对求和问题进行分治,只需要 logN 步
通信方法也可以分为结构化通信(通信网络有一定结构)和非结构化通信(通信网络可能是任意图)。
如果通信网络还在变化,负载均衡算法就必须频繁地更新。
# 聚合
聚合可以减少通信成本:任务的通信需求与其操作的子域的表面成正比,而计算需求与子域的体积成正比。有时我们可以权衡复制计算以减少通信需求和/或执行时间。
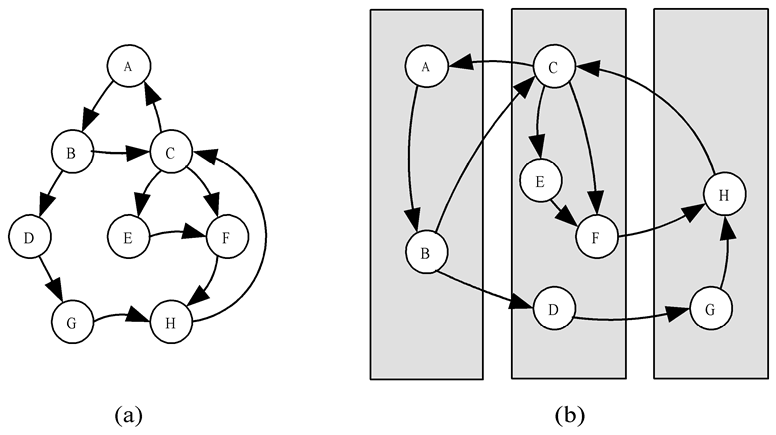
# 映射
映射:将任务映射到处理器上。
目标:最大化处理器利用(即负载均衡) & 最小化处理器间通信(即需要通信的进程可以映射到同一处理器)
不同情况下映射策略:略。
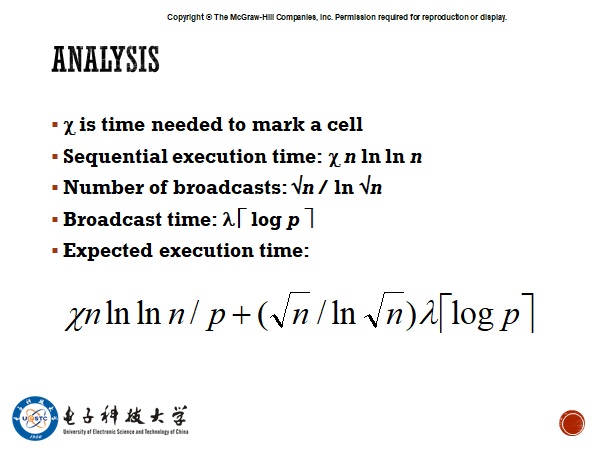
公式:
- :更新一个元素的时间
- :一个元素通信的时间
- :结点数
- :需要的迭代次数
- :处理器数
有一下结论:
- 串行执行时间:
- 并行执行时间:
有点不懂。是在这个问题下的时间公式吗?
# 4 Performance
性能指标:运行时间、加速比、效率、可扩展性等
# 加速比和效率指标
- :串行时间
- : 个进程时的并行时间(按最长时间的进程计算)
- or : 个进程时的加速比 (Speedup)
加速比是速度的正比,是时间的反比
好的加速比:(相较进程数)线性加速、亚线性加速、超线性加速
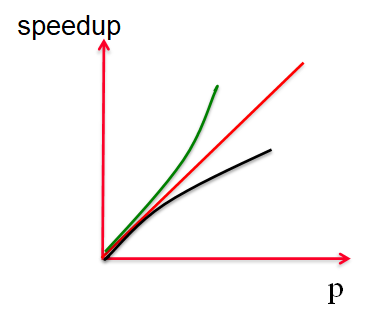
超线性加速出现在:多级内存、缓存影响、DFS 遍历树算法等。
- :不能被并行执行的的串行时间
- :可以被并行执行的串行时间
- :并行执行带来的通信时间
比较显然,公式的意思是:并行算法的时间为:串行时间+并行部分/p+通行时间
这个公式一定要记住,后面的推导都是基于这个公式!
- or :效率
线性加速比程序的效率为 100%。
将 代入即有:
可以推出 。
# Amdahl 定律
Amdahl 定律和 Gustafson-Barsis 定律都把通信成本放缩掉了。两个求的都是加速比,但是注意条件不一样(一个是 一个是 )
令 为串行部分占比(占改进之前的比),即 ,有:
加速比不大于“串行占比+p倍并行占比”的反比
例题:95% of a program's execution time occurs inside a loop that can be executed in parallel. What is the maximum speedup we should expect from a parallel version of the program executing on 8 CPUs?
注意题目说的是串行在改进前需要执行 5% 的时间,这就符合 Amdahl 的条件。答案是 5.9。
# Gustafson-Barsis 定律
令 为串行部分占比(占改进之后的比),即 ,有:
可以看到,如果 小,,并行效率很好。
例题:An application running on 10 processors spends 3% of its time in serial code. What is the scaled speedup of the application?
注意题目说的是串行代码在改进后需要执行 3% 的时间,这就符合 Gustafson-Barsis 的条件。答案是 9.73。
# Karp-Flatt Metric 指标
Amdahl 和 Gustafson-Barsis 都忽略了通信成本,会高估放大比。Karp-Flatt 从另一个角度来进行分析。
但是这个公式起手就很怪异。
令
串行时间 + 通信时间 / 串行时间 + 可并行的时间?
能够推出
这个公式很奇怪,结合例题我大概看懂了:
结论 1:注意到 一定的情况下,串行时间、可并行的时间 是恒定的,所以 和 通信时间 的增长趋势是一样的。
即,在不同的 下,如果 恒定,说明通信时间恒定; 稳定增长,说明通信时间也稳定增长。
结论 2:随 的增大, 不能先增大后减小(只能一直增大/不变或一直减小/不变:一直增大是次线性加速比,而一直减小就是超线性加速比)
例 1:
| 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|
| 1.8 | 2.5 | 3.1 | 3.6 | 4.0 | 4.4 | 4.7 | |
| 计算可得 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
为什么 8 核的加速比只有 4.7?注意到 不随 变化,说明问题不是通信成本,是串行代码耗时太高。
例 2:
| 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|
| 1.9 | 2.6 | 3.2 | 3.7 | 4.1 | 4.5 | 4.7 | |
| 计算可得 | 0.07 | 0.075 | 0.08 | 0.085 | 0.09 | 0.095 | 0.1 |
为什么 8 核的加速比只有 4.7?注意到 不随 变化,说明问题不是通信成本,是串行代码耗时太高。
例 3:
| 4 | 8 | 12 | |
|---|---|---|---|
| 3.9 | 6.5 | ? |
? 处能否为 10?
假设 ?=10,算得 先增大后减小,不可能。
# 等效率
不会,看 PPT
# 可扩展性
不会,看 PPT
# 5 Message-Passing Programming
MPI 常用函数
//First MPI function called by each process
MPI_Init (&argc, &argv);
// First argument is communicator
// Number of processes returned through second argument
MPI_Comm_size (MPI_COMM_WORLD, &p);
// Process rank (in range 0, 1, …, p-1) returned through second argument
MPI_Comm_rank (MPI_COMM_WORLD, &id);
// Call after all other MPI library calls
MPI_Finalize();
// reduce 操作
int MPI_Reduce (
void *operand, /* addr of 1st reduction element */
void *result, /* addr of 1st reduction result, only root get result */
int count, /* reductions to perform */
MPI_Datatype type, /* type of elements */
MPI_Op operator, /* reduction operator */
int root, /* process getting result(s) */
MPI_Comm comm /* communicator */
)
MPI_Reduce (&count, &global_count, MPI_INT, 0, MPI_COMM_WORLD);
// Benchmarking the Program
double elapsed_time;
MPI_Init (&argc, &argv);
MPI_Barrier (MPI_COMM_WORLD);
elapsed_time = - MPI_Wtime();
// ...
MPI_Reduce (…);
elapsed_time += MPI_Wtime();
# 附 MPICH 中文教程
https://scc.ustc.edu.cn/zlsc/cxyy/200910/MPICH/
# 6 The Sieve of Eratosthenes
因为这部分做了实验,所以不多说算法原理了。
int MPI_Bcast (
void *buffer, /* Addr of 1st element */
int count, /* # elements to broadcast */
MPI_Datatype datatype, /* Type of elements */
int root, /* ID of root process */
MPI_Comm comm) /* Communicator */
MPI_Bcast (&k, 1, MPI_INT, 0, MPI_COMM_WORLD);
# 分块算法
这个问题需要按数据分块。可以使用循环分配,可以按块分配。
使用循环分配,
使用按块分配,就是第一章的习题中提到的:
两种算法都可以,后面一种表达式更简单,所以选择这一种。
# 算法性能分析
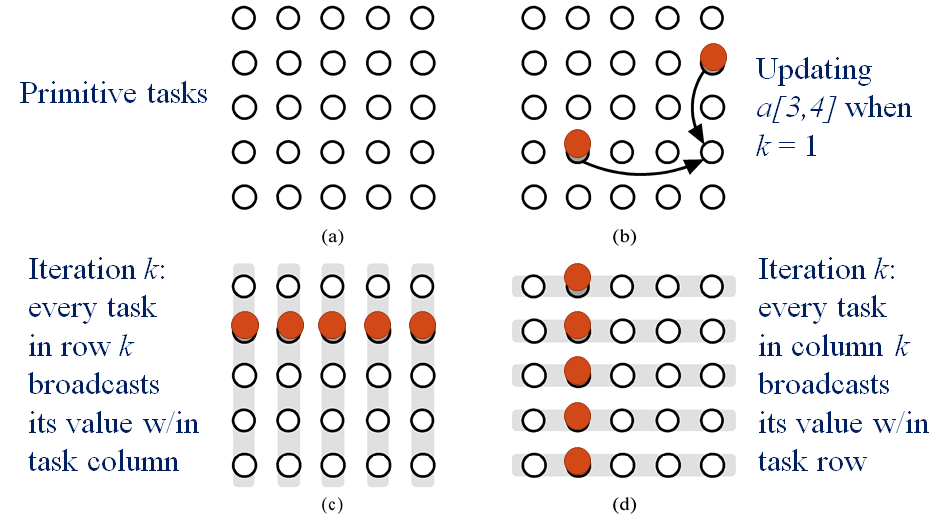
# 7 Floyd's Algorithm
Floyd 算法伪代码:
for k = 0 to n-1
for i = 0 to n-1
for j = 0 to n-1
a[i,j] = min (a[i,j], a[i,k] + a[k,j])
endfor
endfor
endfor
# 分块
把矩阵 A 的每个元素视为一个任务,分解成 个任务。
# 通信
# 聚合和映射
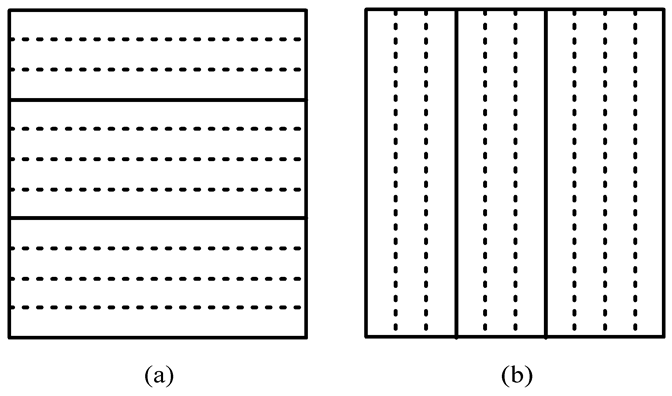
按行或者按列聚合。最后选择按行聚合,在读文件的时候会容易的多。
# 点对点通信
int MPI_Send (
void *message,
int count,
MPI_Datatype datatype,
int dest,
int tag,
MPI_Comm comm
)
int MPI_Recv (
void *message,
int count,
MPI_Datatype datatype,
int source,
int tag,
MPI_Comm comm,
MPI_Status *status
)
Send 和 Recv 需要约定相同的 tag,以及对方的 id (作为自己的 source/dest)。
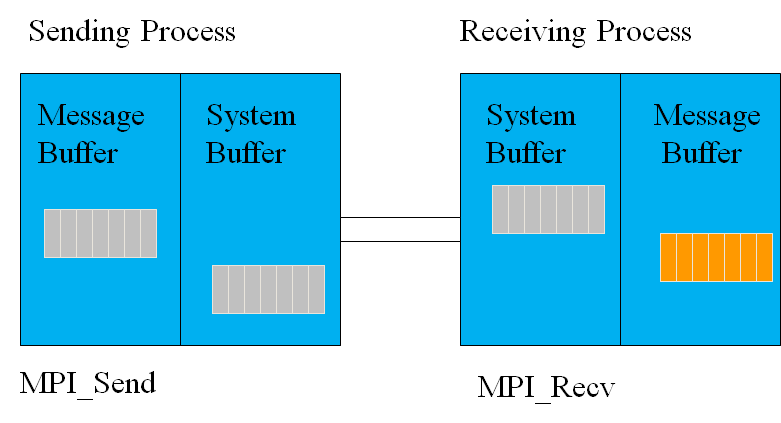
MPI_Send函数会一直阻塞直至 message_buffer 空了。MPI_Recv函数会一直阻塞直至收到消息。
这就很容易造成死锁。
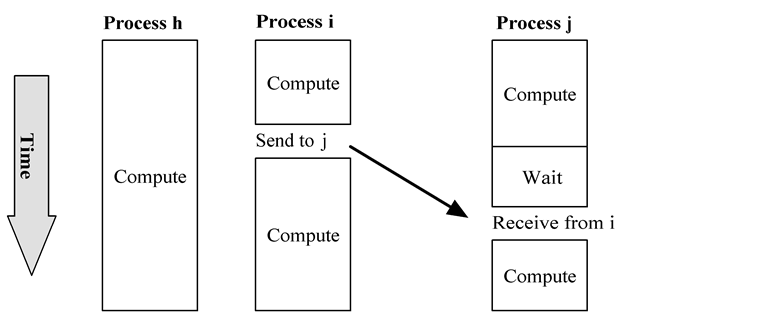
# 死锁
if (id == 0) {
MPI_Recv (&b,...);
MPI_Send (&a,...);
c = (a + b)/2.0;
} else if (id == 1) {
MPI_Recv (&a,...);
MPI_Send (&b,...);
c = (a + b)/2.0;
}
Process 0 blocks waiting for message from 1, but 1 blocks waiting for a message from 0. Deadlock!
if (id ==0) {
MPI_Send(&a, ... 1,MPI_COMM_WORLD);
MPI_Recv(&b, ... 1, MPI_COMM_WORLD,&status);
c = (a+b)/2.0;
}else if (id ==1) {
MPI_Send(&a, ... 0,MPI_COMM_WORLD);
MPI_Recv(&b, ... 0, MPI_COMM_WORLD,&status);
c = (a+b)/2.0;
}
Both processes send before they try to receive, but they still deadlock. Why? The tags are wrong. Process 0 is trying to receive a tag of 1, but Process 1 is sending a tag of 0.
# Ssend
依赖 buffer 的 MPI_send 是不安全的,因为 MPI 标准允许 MPI_Send 可以提供/不提供 buffer。
两种问题可能会出问题:
- 双方都是先发后收,并且发的数据都很大
- 生产者/消费者问题,且生产者生产的比消费者块
MPI 标准定义了 MPI_Ssend,保证发送会被阻塞(s 表 synchronous)。
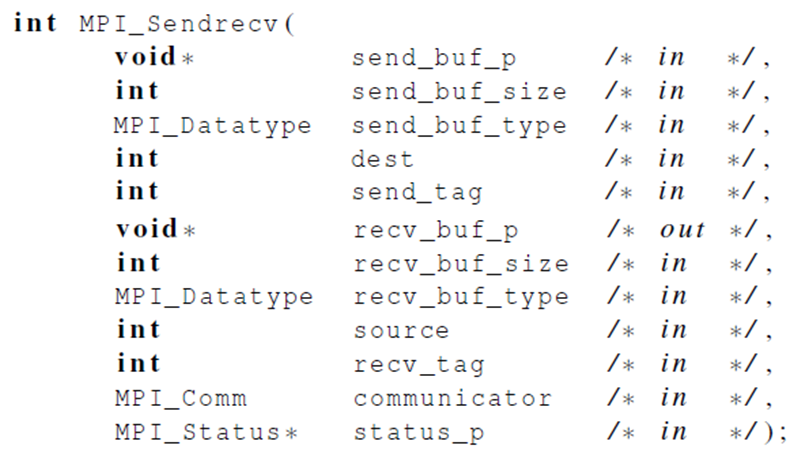
# SendRecv
如果需要同时发送接收,可以通过代码逻辑使大家按照某种顺序,避免死锁,但也可以使用 MPI_SendRecv 同时发送和接收,中间的调度由 MPI 实现。
# 并行 Floyd 算法
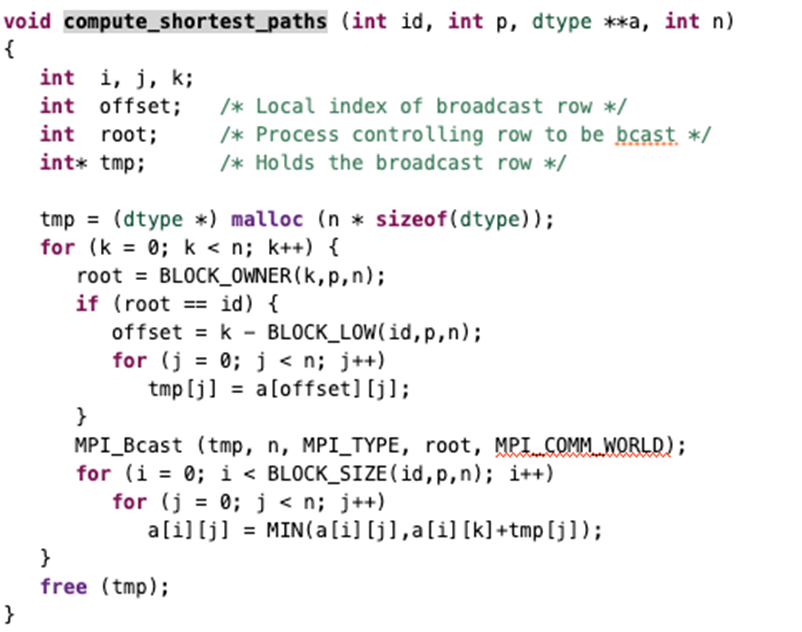
- 计算时间复杂度:
- 通信时间复杂度:
- 执行时间(其中 是显存带宽,其他变量见第三章):
# CUDA 部分
# 结构
- Thread -- Register
- Warp
- Block -- 对应一个 Streming Multiprocessors,Shared Memory
- Grid -- 对应一个 Kernel
- Device -- Global Memory
# 代码思路
用 Block 处理二维图像:
__global__ void PictureKernel(float* d_Pin, float* d_Pout, int height, int width)
{
int Row = blockIdx.y*blockDim.y + threadIdx.y;
int Col = blockIdx.x*blockDim.x + threadIdx.x;
if ((Row < height) && (Col < width)) {
d_Pout[Row*width+Col] = 2.0*d_Pin[Row*width+Col];
}
}
int main()
{
dim3 DimGrid((n-1)/16 + 1, (m-1)/16+1, 1);
dim3 DimBlock(16, 16, 1);
PictureKernel<<<DimGrid,DimBlock>>>(d_Pin, d_Pout, m, n);
}
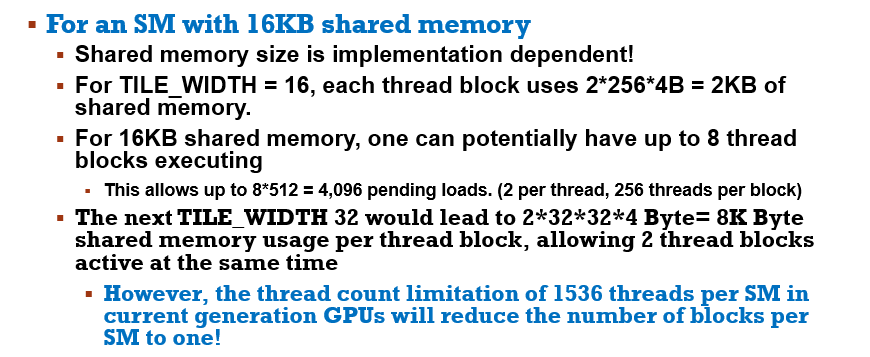
# Block 大小
For Matrix Multiplication using multiple blocks, should I use 8X8, 16X16 or 32X32 blocks for Fermi?
- For 8X8, we have 64 threads per Block. Since each SM can take up to 1536 threads, which translates to 24 Blocks. However, each SM can only take up to 8 Blocks, only 512 threads will go into each SM!
- For 16X16, we have 256 threads per Block. Since each SM can take up to 1536 threads, it can take up to 6 Blocks and achieve full capacity unless other resource considerations overrule.
- For 32X32, we would have 1024 threads per Block. Only one block can fit into an SM for Fermi. Using only 2/3 of the thread capacity of an SM.
# CGMA
CGMA = 从全局内存中取一个数,多少次运算用到了这个数
CGMA 越大越好
# Shared Memory And Threading
# OpenACC 部分
# GPU 占用率
GPU Occupancy is:
- How much parallelism is running / How much parallelism the hardware could run
- 100% occupancy is not required for, nor does it guarantee best performance.
- Less than 50% occupancy is often a red flag